

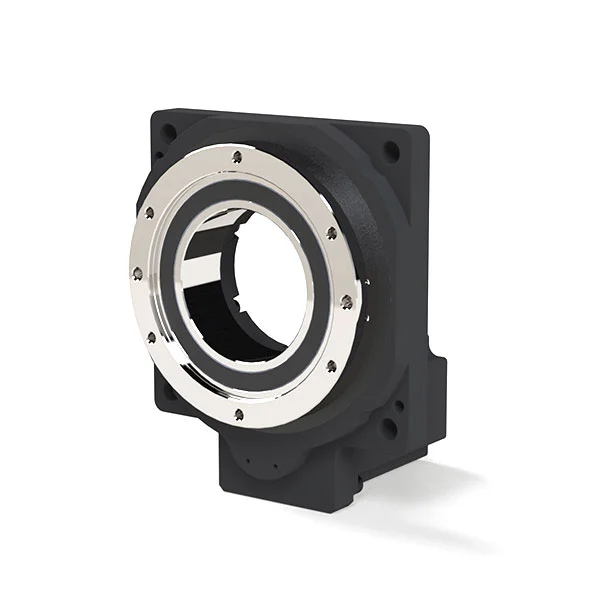

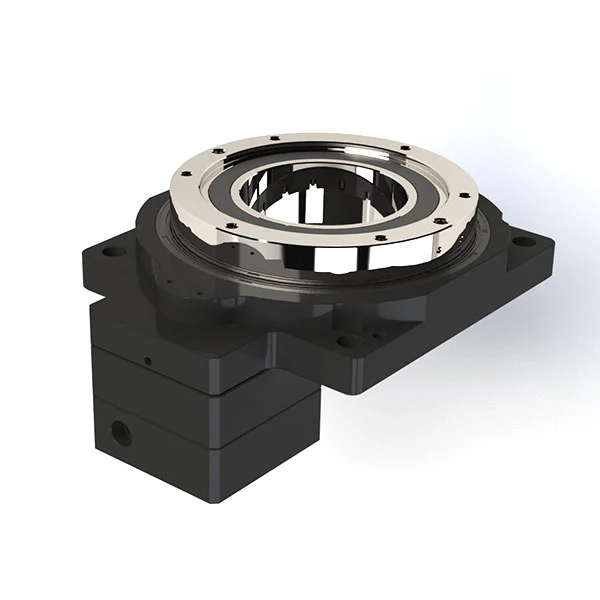



แพลตฟอร์มโรตารี่กลวงใช้โครงสร้างเกียร์ที่มีความแม่นยำสูงและตลับลูกปืนรัศมีเพื่อปรับปรุงแรงบิดและความแข็งแกร่ง เมื่อจับคู่กับเซอร์โวมอเตอร์หรือมอเตอร์สเต็ปจะสามารถทำการแบ่งมุมโดยพลการ ไม่เพียง แต่เป็นไปตามการควบคุมหลักที่ไม่สามารถทำได้โดยผู้ทำดัชนี แต่ยังมีความแม่นยำในการวางตำแหน่งเทียบได้กับมอเตอร์ไดรฟ์โดยตรงและสามารถบรรลุตำแหน่งของแรงเฉื่อยภายในระยะเวลาอันสั้น
คำแนะนำการติดตั้งสำหรับแพลตฟอร์มโรตารี่กลวง
 ก่อนอื่นยืนยันว่ามอเตอร์ตรงกับแพลตฟอร์มและลบสิ่งแปลกปลอมบนพื้นผิวหรือไม่ |
② ถอดสกรูระดับแบนบนหน้าแปลนการเปลี่ยนผ่านและหมุนปลายอินพุตเพื่อปรับตำแหน่งจนกว่าจะสามารถมองเห็นสลักเกลียวของวงแหวนล็อคได้ |
③ จัดแนวเพลามอเตอร์ให้เข้ากับปลายอินพุตลดลงแทรกลงในตัวลดและปรับสลักเกลียวที่เชื่อมต่อไว้ล่วงหน้าในแนวทแยงมุม |
 กระชับแหวนล็อคและขันสลักเกลียวให้แน่น อ้างถึงตารางด้านล่างสำหรับแรงบิด |
⑤ ใช้ประแจแรงบิดเพื่อกระชับสกรูยึดในแนวทแยงมุม อ้างถึงตารางแรงบิดด้านล่างสำหรับแรงบิด |
⑥ ขันสกรูระดับแบนให้แน่น |
การติดตั้งแขนเสื้อเพลา

จุดเลือกของแพลตฟอร์มโรตารี่กลวง
การคำนวณโหลด/ความเฉื่อยของวัตถุที่จะขนส่ง (JW)
ความเฉื่อยของวัตถุที่จะขนส่งควรน้อยกว่า 30 เท่าของอุปกรณ์ส่งสัญญาณเป็นมาตรฐาน
ปลายเอาต์พุต
■การคำนวณแรงบิดเร่ง (TA)
อ้างถึงสูตรต่อไปนี้:
การเร่งแรงบิด t [n · m] = (jm + jw) * π/30 * (n₂ - n₁)/t₁)
โดยที่ JM: ความเฉื่อยของมอเตอร์ [kg ·m²]; JA: ความเฉื่อยของกลไก [kg ·m²]; JW: ความเฉื่อยของภาระ [kg ·m²]; N₂: ความเร็วในการใช้งาน [r/min]; N₁: ความเร็วเริ่มต้น [r/min]; T₁: การเร่งความเร็ว (การชะลอตัว) เวลา [S]
■การคำนวณแรงบิดที่ต้องการ
แรงบิดที่ต้องการคำนวณโดยการคูณผลรวมของแรงบิดโหลดที่เกิดจากความต้านทานแรงเสียดทานและแรงบิดเร่งที่เกิดจากความเฉื่อยโดยปัจจัยด้านความปลอดภัย
แรงบิดที่ต้องการ t = (แรงบิดโหลด [n · m] + แรงบิดเร่ง [n · m]) ×ปัจจัยด้านความปลอดภัย = (TL + TA) × S. ปัจจัยด้านความปลอดภัย S มากกว่า 1.5
■การเลือกมอเตอร์
แรงบิดที่ต้องการของมอเตอร์จะต้องอยู่ในช่วงสเปคของแรงบิดความเร็ว
เส้นโค้งลักษณะแรงบิดความเร็วของมอเตอร์ก้าว
ที่อยู่
เลขที่ 148 หมู่บ้าน Dongfeng เขตเสี่ยวซาน เมืองหางโจว มณฑลเจ้อเจียง ประเทศจีน
โทร














